Kursus ANSYS Fluent: Solusi Analisis Aerodinamika Mobil Listrik Hemat Energi
Industri otomotif saat ini sedang mengalami pergeseran besar menuju kendaraan listrik (EV). Oleh karena itu, permintaan terhadap tenaga ahli yang mampu mendesain kendaraan hemat energi semakin meningkat tajam. Jika Anda ingin meningkatkan nilai jual sebagai engineer atau periset, menguasai Computational Fluid Dynamics (CFD) adalah langkah yang paling strategis.
Melalui kursus ANSYS Fluent ini, Anda tidak hanya akan belajar teori semata. Sebaliknya, Anda akan dipandu untuk memahami workflow lengkap simulasi aerodinamika, mulai dari persiapan geometri hingga proses optimasi desain untuk meminimalkan hambatan udara.
Mengapa Simulasi CFD Sangat Vital dalam Desain EV?
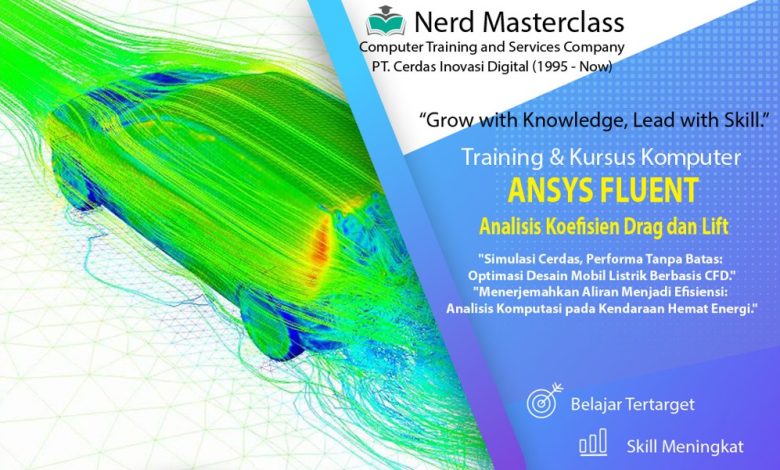
Dalam pengembangan mobil listrik, efisiensi baterai adalah prioritas utama. Namun, efisiensi ini sangat dipengaruhi oleh gaya hambat udara atau drag. Akibatnya, para engineer harus mampu menganalisis aliran fluida di sekitar bodi mobil dengan presisi tinggi.
Selain itu, penggunaan simulasi komputer menawarkan keuntungan sebagai berikut:
-
Pertama, memangkas biaya operasional karena mengurangi ketergantungan pada uji wind tunnel fisik yang mahal.
-
Selanjutnya, proses iterasi desain menjadi jauh lebih cepat sehingga produk dapat segera diluncurkan ke pasar.
-
Akhirnya, simulasi memberikan visualisasi mendalam mengenai fenomena turbulensi yang kasat mata.
Keahlian Teknis yang Akan Anda Dapatkan
Kurikulum kami dirancang secara spesifik untuk menjawab kebutuhan industri masa kini. Dengan demikian, setelah menyelesaikan pelatihan ini, Anda akan memiliki kemampuan praktis yang siap pakai. Pertama-tama, Anda akan menguasai teknik Geometry Cleanup menggunakan SpaceClaim untuk mempersiapkan model 3D mobil yang siap disimulasikan.
Kemudian, materi akan berlanjut ke strategi Meshing. Tahap ini sangat krusial karena kualitas mesh menentukan akurasi hasil. Lebih jauh lagi, Anda akan mempelajari cara mengatur kondisi batas (Boundary Conditions) yang tepat, seperti kecepatan inlet dan moving wall untuk merepresentasikan kondisi jalan raya yang sebenarnya.
Terakhir, Anda akan mampu melakukan Post-Processing. Pada tahap ini, peserta akan diajarkan cara mengekstrak data penting seperti Drag Coefficient ($C_d$) dan Lift Coefficient ($C_l$) serta menyajikannya dalam laporan teknis yang profesional.
Struktur Pembelajaran yang Sistematis
Agar proses belajar berjalan efektif, materi disusun secara bertahap. Sementara itu, metode penyampaian materi dibuat seinteraktif mungkin agar mudah dipahami oleh pemula maupun praktisi. Berikut adalah alur pembelajarannya:
-
Pengenalan Dasar: Memahami antarmuka ANSYS dan konsep dasar CFD.
-
Pra-pemrosesan: Fokus pada pembuatan enclosure (terowongan angin virtual).
-
Setup Fisika: Memilih model turbulensi yang paling akurat, seperti k-epsilon atau k-omega SST.
-
Analisis & Validasi: Memastikan konvergensi solusi dan validitas data.
Metode Belajar dan Pendaftaran
Kami menyadari bahwa setiap peserta memiliki kesibukan yang berbeda. Oleh sebab itu, kami menawarkan metode belajar yang fleksibel. Anda dapat memilih kelas Online via Zoom yang interaktif dan terjadwal. Di sisi lain, bagi Anda yang lebih menyukai praktik langsung, tersedia kelas Offline dengan bimbingan intensif dari instruktur.
Kesimpulannya, jangan lewatkan kesempatan untuk menjadi ahli simulasi aerodinamika. Segera daftarkan diri Anda karena kuota peserta sangat terbatas demi menjaga kualitas pembelajaran.
Amankan Kursi Anda Sekarang
Untuk informasi jadwal lengkap dan pendaftaran, silakan hubungi kontak di bawah ini:
-
WhatsApp: 0812-5222-7510
-
Formulir: bit.ly/daftarkursusjm
-
Website Resmi: https://kursuskomputerprivat.com
Bergabunglah sekarang dan tingkatkan kompetensi Anda dalam teknologi masa depan!
#ANSYSFluent #KursusCFD #Aerodinamika #MobilListrik #TeknikMesin #SimulationEngineering #JogjaCourse #AutomotiveDesign #ElectricVehicle #DragCoefficient #EnergyEfficiency